EMF Retrorsum Motoris Synchroni Magnetis Permanentis
1. Quomodo EMF retrorsum generatur?
Generatio vis electromotricis inversae facile intellegitur. Principium est conductorem lineas vis magneticas secare. Dummodo motus relativus inter duas intersit, campus magneticus potest esse immotus et conductor eum secare, vel conductor potest esse immotus et campus magneticus moveri.
Motoribus synchronis magnetibus permanentibus instructis, spirae eorum in statore (conductore) fixae sunt, magnetes permanentes autem in rotore (campo magnetico) fixi. Cum rotor rotatur, campus magneticus a magnetibus permanentibus in rotore generatus rotabitur et a spiralibus in statore secabitur, vim electromotricem inversam in spiralibus generans. Cur vis electromotrix inversa appellatur? Ut nomen indicat, directio vis electromotricis inversae E directioni tensionis terminalis U opposita est (ut in Figura 1 demonstratur).
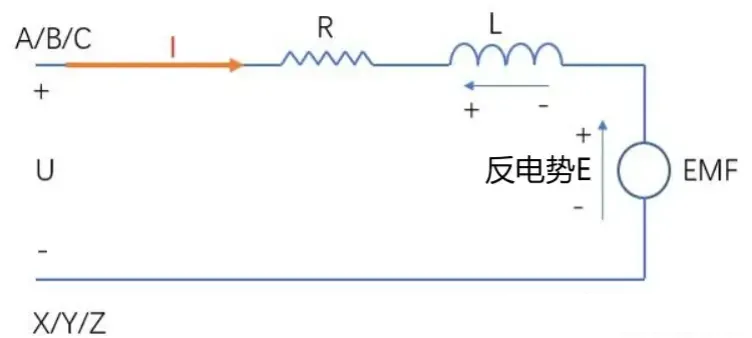
Figura 1
2. Quaenam est relatio inter EMF inversam et tensionem terminalem?
Ex Figura 1 videri potest relationem inter vim electromotricem inversam et tensionem terminalem sub onere esse:
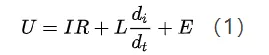
Examen vis electromotricis inversae plerumque sub condicione sine onere, sine currente et celeritate 1000 rpm perficitur. Generaliter, valor 1000 rpm definitur ut coefficiens vis electromotricis inversae = valor medius vis electromotricis inversae/celeritas. Coefficiens vis electromotricis inversae est parametrus magni momenti motoris. Hic notandum est vim electromotricem inversam sub onere constanter mutari antequam celeritas stabilis sit. Ex formula (1), scire possumus vim electromotricem inversam sub onere minorem esse quam tensio terminalis. Si vis electromotrix inversa maior est quam tensio terminalis, fit generator et tensionem ad exterius emittit. Cum resistentia et currente in opere reali parvae sint, valor vis electromotricis inversae fere aequalis est tensioni terminalis et limitatur a valore nominali tensionis terminalis.
3. Significatio physica vis electromotricis retroversae
Finge quid accideret si EMF a tergo non existeret? Ex aequatione (1), videre possumus sine EMF a tergo, totum motorem aequivalere puro resistore, fiens instrumentum quod multum caloris generat, quod contrarium est conversioni energiae electricae in energiam mechanicam a motore factae. In aequatione conversionis energiae electricae... UIt est energia electrica ingressa, qualis est energia electrica ingressa in accumulatorem, motorem vel transformatorem; I2Rt est energia amissa caloris in unoquoque circuitu, quae est genus energiae amissae caloris, quo minor eo melior; differentia inter energiam electricam ingressam et energiam electricam amissae caloris, est energia utilis correspondens vi electromotrici retroversae.
UIt est energia electrica ingressa, qualis est energia electrica ingressa in accumulatorem, motorem vel transformatorem; I2Rt est energia amissa caloris in unoquoque circuitu, quae est genus energiae amissae caloris, quo minor eo melior; differentia inter energiam electricam ingressam et energiam electricam amissae caloris, est energia utilis correspondens vi electromotrici retroversae. Aliis verbis, vis electromotrix inversa (EMF) ad energiam utilem generandam adhibetur et inverse cum iactura caloris relata est. Quo maior energia iacturae caloris, eo minor energia utilis assequibilis. Obiective loquendo, vis electromotrix inversa energiam electricam in circuitu consumit, sed non est "iactura". Pars energiae electricae vi electromotrici inversae correspondens in energiam utilem pro apparatu electrico convertetur, ut puta energia mechanica motorum, energia chemica accumulatorum, etc.
Aliis verbis, vis electromotrix inversa (EMF) ad energiam utilem generandam adhibetur et inverse cum iactura caloris relata est. Quo maior energia iacturae caloris, eo minor energia utilis assequibilis. Obiective loquendo, vis electromotrix inversa energiam electricam in circuitu consumit, sed non est "iactura". Pars energiae electricae vi electromotrici inversae correspondens in energiam utilem pro apparatu electrico convertetur, ut puta energia mechanica motorum, energia chemica accumulatorum, etc.
Ex hoc videri potest magnitudinem vis electromotricis retroversae significare facultatem apparatus electrici convertendi energiam totalem in energiam utilem, quod gradum facultatis conversionis apparatus electrici reflectit.
4. A quo magnitudo vis electromotricis inversae pendet?
Formula computandi vis electromotricis retroactivae est: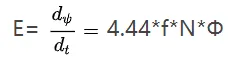
E est vis electromotrix spiralis, ψ est fluxus magneticus, f est frequentia, N est numerus spirarum, et Φ est fluxus magneticus.
Formula supra scripta fretus, credo omnes paucos factores, qui magnitudinem vis electromotricis inversae afficiunt, dicere posse. Hic articulus est ad summam:
(1) FEM a reverso aequalis est celeritati mutationis fluxus magnetici. Quo maior celeritas, eo maior mutationis ratio et eo maior FEM a reverso.
(2) Ipse fluxus magneticus aequalis est numero spirarum multiplicato per fluxum magneticum unius spirae. Ergo, quo maior numerus spirarum, eo maior fluxus magneticus et eo maior EMF aversa.
(3) Numerus spirarum ad schema convolutionis pertinet, ut puta nexus stella-triangolo, numerus spirarum per fissuram, numerus phasium, numerus dentium, numerus ramorum parallelorum, et schema spatii pleni vel spatii brevis.
(4) Fluxus magneticus unius spirae aequalis est vi magnetomotrici divisa per resistentiam magneticam. Ergo, quo maior vis magnetomotrix, eo minor resistentia magnetica in directione fluxus magnetici et eo maior EMF retrorsum.
(5) Resistentia magnetica cum hiatu aereo et coordinatione polorum et fissurarum coniuncta est. Quo maior hiatus aereus, eo maior resistentia magnetica et eo minor EMF aversa. Coordinatio polorum et fissurarum magis implicata est et analysin specificam requirit.
(6) Vis magnetomotrix cum magnetismo residuo magnetis et area effectiva magnetis coniungitur. Quo maior magnetismus residuus, eo maior EMF retrorsum. Area effectiva cum directione magnetizationis, magnitudine et loco magnetis coniungitur et analysin specificam requirit.
(7) Magnetismus residuus temperaturae coniunctus est. Quo altior temperatura, eo minor EMF aversa.
Summa summarum, factores qui facultatem electromotricem reversam afficiunt includunt celeritatem rotationis, numerum turbinum per fissuram, numerum phasium, numerum ramorum parallelorum, spatium plenum et breve, circuitum magneticum motoris, longitudinem hiatus aerei, congruentiam polorum et fissurarum, magnetismum residuum chalybis magnetici, collocationem et magnitudinem chalybis magnetici, directionem magnetizationis chalybis magnetici, et temperaturam.
5. Quomodo magnitudinem vis electromotricis inversae in consilio motoris eligere?
In designio motoris, EMF aversa magni momenti est. Si EMF aversa bene designata est (magnitudine idonea, distortione undae humili), motor bonus est. EMF aversa plures effectus maiores in motorem habet:
1. Magnitudo EMF a tergo punctum magneticum debile motoris determinat, et punctum magneticum debile distributionem mappae efficientiae motoris determinat.
2. Frequentia distortionis undae EMF inversae momentum undulationis motoris et lenitatem momenti emissionis cum motor currit afficit.
3. Magnitudo EMF a tergo directe coefficientem momenti motoris determinat, et coefficient EMF a tergo proportionalis est coefficienti momenti.
Ex hoc, hae contradictiones in consilio motoris derivari possunt:
a. Cum EMF a tergo magnus est, motor magnum momentum rotatorium ad limitem currentis regulatoris in area operationis lentae celeritatis conservare potest, sed momentum rotatorium alta celeritate emittere non potest, nec celeritatem exspectatam attingere potest;
b. Cum vis electromotoria posterior parva est, motor adhuc capacitatem productionis in regione celeritatis magnae habet, sed momentum torquens non potest ad eandem vim regulatoris ad celeritatem lenem perveniri.
6. Effectus positivus EMF retrorsum in motores magnetis permanentis.
Exsistentia EMF retroactivae magni momenti est ad operationem motorum magnetis permanentis. Quaedam commoda et functiones speciales motoribus afferre potest:
a. Energiae conservatio
EMF retrorsum a motoribus magnetis permanentis generatum potest currentem motoris minuere, ita iacturam potentiae minuens, iacturam energiae minuens, et finem conservationis energiae assequens.
b. Momentum torquendi augeatur
FEM a tergo tensioni potentiae opponitur. Cum celeritas motoris crescit, FEM a tergo quoque augetur. Tensio inversa inductantiam involucri motoris minuet, quod augmentum currentis efficit. Hoc motori permittit momentum torquens additum generare et potentiam motoris augere.
c. Retardatio inversa
Postquam motor magnetis permanentis vim amittit, propter praesentiam EMF retrorsum, fluxum magneticum generare pergere potest et rotorem rotare pergere, quod effectum celeritatis inversae EMF retrorsum format, qui in quibusdam applicationibus, ut machinis instrumentis et aliis instrumentis, perutilis est.
Breviter, EMF aversa est elementum indispensabile motorum magnetis permanentis. Multa commoda motoribus magnetis permanentis affert et munus magni momenti agit in designio et fabricatione motorum. Magnitudo et forma undae EMF aversae pendent a factoribus ut designio, processu fabricationis et condicionibus usus motoris magnetis permanentis. Magnitudo et forma undae EMF aversae magnum momentum habent in effectu et stabilitate motoris.
Anhui Mingteng Societas Instrumentorum Electromechanicorum Magnetis Permanentis, Ltd. (https://www.mingtengmotor.com/)Fabricator professionalis motorum synchronorum magnetis permanentis est. Centrum nostrum technicum plus quam quadraginta operarios investigationis et progressionis habet, in tres partes divisos: designationem, processum, et probationem, qui in investigatione et evolutione, designatione, et innovatione processuum motorum synchronorum magnetis permanentis specializantur. Programmatibus designationis professionalibus et programmatibus designationis motorum magnetis permanentis a nobis ipsis elaboratis utentes, per processum designationis et fabricationis motoris, magnitudo et forma undae vis electromotricis posterioris diligenter considerabuntur secundum necessitates reales et condiciones laboris specificas usoris, ut efficacia et stabilitas motoris confirmentur et efficientia energiae motoris augeatur.
Copyright: Hic articulus est impressio numeri publici WeChat "电机技术及应用", pagina originalis https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Hic articulus opiniones societatis nostrae non repraesentat. Si opiniones vel opiniones differentes habes, quaeso nos corrige!
Tempus publicationis: XX Augusti, MMXXIV